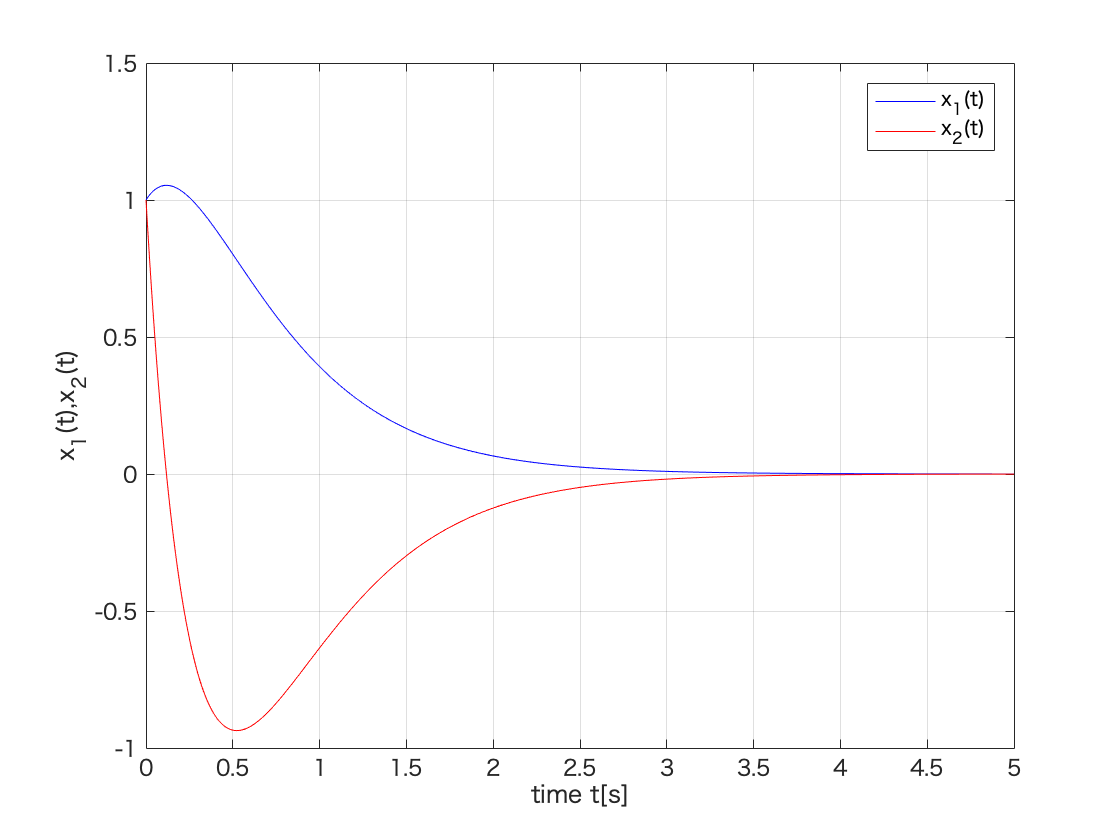
%図8.1 clear all; close all; %システムパラメータを与える A = [0 1;-6 -5]; %行列A b = [0;1]; %ベクトルb c = [1 0;0 1]; %x_1とx_2をプロットするためにcを単位行列にする d = [0;0]; %cに合わせてdは零ベクトルとする %システムの状態空間表現を与える sysP = ss(A,b,c,d); %状態空間表現 %システム行列Aの固有値を求める eig(A) %システム行列Aの固有値 %時間変数の定義 t = 0:0.01:5; %0から5まで0.01刻み %システムの初期値を与える x0 = [1;1]; %x(0) = [1;1]' %初期値応答の計算 y = initial(sysP,x0,t); %初期値応答を求める %図8.1のプロット plot(t,y(:,1),'-b',t,y(:,2),'-r'); %x_1とx_2を抽出してプロット xlim([0 5]); %横軸(時間軸)の範囲の指定 ylim([-1.0 1.5]); %縦軸の範囲の設定 grid; %罫線を表示 xlabel('time t[s]'); %横軸のラベル表示 ylabel('x_1(t),x_2(t)'); %縦軸のラベル表示 legend('x_1(t)','x_2(t)'); %凡例の表示
ans = -2.0000 -3.0000